VS-80CPQ150PBF 2X40 A/150V SCHOTTKY RECTIFIER DIODE
STTH5R06B-TR TO-252 5A 600V ULTRAFAST HIGH VOLTAGE RECTIFIER DIODE
MBR3045CT TO-220 30A 45V SCHOTTKY DİYOT

5 ADET - 1N4757 51V 1W ZENER DIODE
BZV55C11 SOD-80 (MINIMELF) 11V 0.5W ZENER DIODE
BZV55-C15 SOD-80 MiniMELF 15V 0.5W Zener Diyot

ZY22-22V 2W DO-41 ZENER DIODE

ZPY300 DO-41 300V 1.3W ZENER DIODE

VISHAY
ZY160-E3/73 DO-41 160V 2W ZENER DIODE
ZMM55C6V8-HT SOD-80 (MINIMELF) 6.8V 0.5W ZENER DIODE
ZMM55C9V1-HT SOD-80 (MINIMELF) 9.1V 0.5W ZENER DIODE
ZMM55C5V1-HT SOD-80 (MINIMELF) 5.1V 0.5W ZENER DIODE
ZMM55C8V2-HT SOD-80 (MINIMELF) 8.2V 0.5W ZENER DIODE
ZMM55C6V2-HT SOD-80 (MINIMELF) 6.2V 0.5W ZENER DIODE
ZMM55-C3V3_R1_10001 SOD-80 (MINIMELF) 3.3V 0.5W 5% ZENER DIODE
ZMM55C2V4-HT SOD-80 (MINIMELF) 2.4V 0.5W ZENER DIODE
PANJIT
ZMM55-C3V9_R1_10001 SOD-80 3.9V 500MW ZENER DIODE
ZMM55C4V3-HT SOD-80 (MINIMELF) 4.3V 0.5W ZENER DIODE
ZMM55-C2V7_R1_10001 SOD-80 (MINIMELF) 2.7V 0.5W 5% ZENER DIODE
ZMM55C36-HT SOD-80 (MINIMELF) 36V 0.5W ZENER DIODE
Elektronik projelerde güçlü yükleri (motorlar, yüksek akım çeken LED şeritler vb.) Arduino gibi mikrodenetleyicilerle doğrudan kontrol etmek, kartınıza zarar verebilir. Ayrıca, motor gibi indüktif yükler, çalışmayı durdurduklarında "ters elektromotor kuvvet" (flyback voltage) üreterek devredeki diğer hassas bileşenlere zarar verme potansiyeline sahiptir.
Bu projede, bir röle modülü kullanarak Arduino'dan izole bir şekilde harici bir yükü nasıl kontrol edeceğimizi ve diyotlar aracılığıyla devremizi bu zararlı etkilerden nasıl koruyacağımızı öğreneceğiz. Bu sayede daha güvenli ve sağlam Arduino projeleri geliştireceksiniz!
Gerekli Malzemeler
Bu projeyi hayata geçirmek için ihtiyacın olan tüm malzemeler aşağıda listelenmiştir. Bu bileşenler elektronik hobi kitlerinde kolayca bulunabilir.
- Arduino Uno R3: Projemizin beyni, röle modülünü kontrol edecek.
- Röle modülü (5V, tekli): Arduino'dan gelen düşük voltajlı sinyal ile yüksek akım çeken yükü kontrol etmemizi sağlayan anahtar. Arduino'yu doğrudan yüksek akımdan korur.
- Diyot 1N4007 veya 1N4148 x 2 adet:Flyback diyotu: DC motor gibi indüktif yükleri korumak için.Ters polarite koruma diyotu (opsiyonel ama önerilir): Güç girişine ters bağlantı riskine karşı devreyi korumak için.
- Flyback diyotu: DC motor gibi indüktif yükleri korumak için.
- Ters polarite koruma diyotu (opsiyonel ama önerilir): Güç girişine ters bağlantı riskine karşı devreyi korumak için.
- DC motor + pervane: Projemizde röle ile kontrol edeceğimiz "yük" olarak kullanılacak (veya başka bir 5V yük).
- Küçük breadboard: Devre elemanlarını lehim yapmadan kolayca bağlamak için.
- Jumper kablolar: Bileşenleri birbirine ve Arduino'ya bağlamak için.
- Harici güç kaynağı (5V adaptör veya pil paketi): DC motor gibi yüksek akım çeken yükler için gereklidir. Arduino'nun USB portu yeterli gelmez.
- USB kablosu: Arduino'yu bilgisayara bağlamak, kod yüklemek ve enerji vermek için.
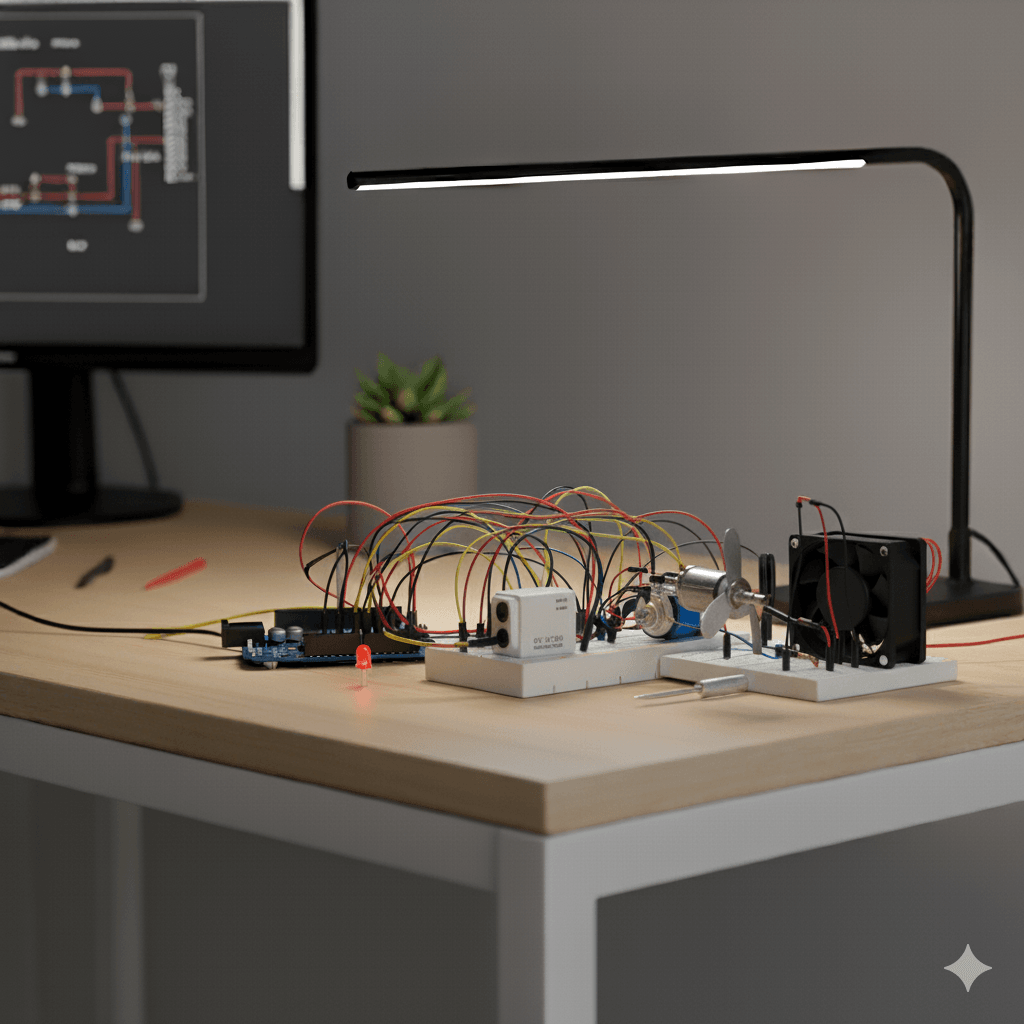
Devre Bağlantı Şeması
Devre bağlantılarını doğru yapmak, hem projenin çalışmasını hem de bileşenlerin korunmasını sağlar. Özellikle diyotların yönüne dikkat edin.
1. Röle Modülü Bağlantıları:
- Röle modülünün VCC pinini Arduino'nun 5V pinine bağlayın.
- Röle modülünün GND pinini Arduino'nun GND pinine bağlayın.
- Röle modülünün IN (Sinyal) pinini Arduino'nun D4 pinine bağlayın.
2. DC Motor, Flyback Diyot ve Harici Güç Kaynağı Bağlantıları:
- Flyback Diyotu (1N4007 veya 1N4148): DC motorun iki ucuna paralel olarak bağlayın. Diyotun çizgili (katot) tarafı motorun artı (+) tarafına, çizgisiz (anot) tarafı motorun eksi (-) tarafına bakacak şekilde olmalıdır. Bu diyot, motor kapanırken oluşan yüksek voltaj sıçramalarını absorbe eder.
- Harici güç kaynağının (+) pozitif ucunu, röle modülünün COM (Common) portuna bağlayın.
- Röle modülünün NO (Normally Open) portunu, DC motorun bir ucuna bağlayın (Diyotun artı tarafı).
- DC motorun diğer ucunu (Diyotun eksi tarafı) harici güç kaynağının (-) negatif ucuna bağlayın.
- ÖNEMLİ: Harici güç kaynağının (-) negatif ucunu aynı zamanda Arduino'nun GND pinine de bağlayın. Ortak toprak bağlantısı, tüm devrenin doğru çalışması için elzemdir.
3. (Opsiyonel) Ters Polarite Koruma Diyotu (1N4007):
- Bu diyot, harici güç kaynağını Arduino'ya bağlarken olası ters polarite bağlantılarına karşı koruma sağlar.
- Diyotun anot (çizgisiz) ucunu harici güç kaynağının (+) pozitif ucuna bağlayın.
- Diyotun katot (çizgili) ucunu ise Arduino'nun 5V pinine bağlayın. (Bu durumda Arduino'yu harici güç kaynağından beslemiş olursunuz.)
- Alternatif: Eğer Arduino'yu USB'den besleyip sadece yükü harici besleyecekseniz, bu diyotu harici güç kaynağı ile yük arasına koyabilirsiniz. En güvenli yol, harici güç kaynağının pozitif ucunu röleye gitmeden önce bu diyottan geçirmektir.
4. Genel Güç Bağlantısı:
- Arduino'yu bilgisayarınıza USB kablosu ile bağlayın (veya 3. adımdaki gibi harici kaynaktan).
Arduino Kodları
Devre bağlantılarını tamamladıktan sonra sıra projenin beynini oluşturan koda geldi. Arduino IDE'yi açın ve aşağıdaki kodları kopyalayıp yapıştırın. Bu kod, basitçe röleyi belirli aralıklarla açıp kapatarak motoru çalıştırıp durduracaktır.
C++
// Röle pinini tanımlıyoruz
const int relayPin = 4; // Röle modülünün IN pinini D4'e bağladık
// Fanın açık/kapalı durumu için değişken
bool motorState = false; // Başlangıçta motor kapalı
void setup() {
// Röle pinini OUTPUT olarak ayarlıyoruz
pinMode(relayPin, OUTPUT);
// Başlangıçta röleyi kapalı tutuyoruz (motor kapalı)
// Genellikle röle modüllerinde HIGH sinyal röleyi kapatır.
// Modülünüze göre LOW da olabilir, deneme yanılma ile bulunabilir.
digitalWrite(relayPin, HIGH);
Serial.begin(9600); // Seri monitörü başlatıyoruz
Serial.println("Diyot Korumalı Yük Kontrolü Hazır!");
Serial.println("Motor 3 saniyede bir açılıp kapanacak.");
}
void loop() {
// Motoru çalıştır (Röleyi aç)
digitalWrite(relayPin, LOW); // Modülünüze göre HIGH da olabilir
motorState = true;
Serial.println("Motor Çalışıyor (Röle Açık)");
delay(3000); // 3 saniye bekle
// Motoru durdur (Röleyi kapat)
digitalWrite(relayPin, HIGH); // Modülünüze göre LOW da olabilir
motorState = false;
Serial.println("Motor Durdu (Röle Kapalı)");
delay(3000); // 3 saniye bekle
}
Not: Röle modüllerinin "active-LOW" veya "active-HIGH" çalışması farklılık gösterebilir. Kodda digitalWrite(relayPin, LOW); motoru çalıştırırken, digitalWrite(relayPin, HIGH); durdurur. Eğer beklendiği gibi çalışmazsa, bu değerleri tersine çevirerek deneyin.
Projenin Çalışma Mantığı ve Geliştirme Fikirleri
Bu projede, Arduino ile bir röle modülünü kontrol ederek harici bir güç kaynağından beslenen DC motor gibi bir yükü güvenli bir şekilde nasıl çalıştırıp durduracağımızı öğrendiniz. Flyback diyotu, motorun duruş anında ürettiği yüksek voltaj sıçramalarını emerek Arduino'yu ve diğer bileşenleri korur. Röle ise Arduino'nun düşük akım çıkışıyla, motorun ihtiyaç duyduğu yüksek akımı izole ederek Arduino'nun zarar görmesini engeller.
Bu projeyi daha da geliştirmek isterseniz:
- Sensörle Kontrol: Bir sıcaklık sensörü (LM35) kullanarak fanı ortam sıcaklığı belirli bir eşiği aştığında otomatik olarak çalıştırabilirsiniz.
- Buton Kontrolü: Bir buton ekleyerek motoru manuel olarak açıp kapatabilirsiniz (önceki "Mini Soğutucu Fan" projesine benzer).
- Hız Kontrolü: Eğer yükünüz bir motor ise, bir motor sürücü modülü (PWM destekli) kullanarak motorun hızını kontrol edebilirsiniz.
- Daha Karmaşık Yükler: Bu prensibi kullanarak solenoid valfler, ısıtıcılar veya daha büyük LED şeritler gibi farklı yükleri kontrol edebilirsiniz.
Bu proje, güç elektroniği ve devre korumasının temel prensiplerini anlamak için çok önemlidir. Güvenli ve stabil Arduino projeleri geliştirmek için bu bilgileri kullanmaktan çekinmeyin!